Regular Newmark-
The update procedure of the Newmark-
where the accelerations are given by solving
Rearrange things so that all the new stuff is on the left, and the old stuff on the right
and put it in matrix form so we can actually see what's going on
If the update matrix
Since

In theory, we could visualize the 3D region defined by
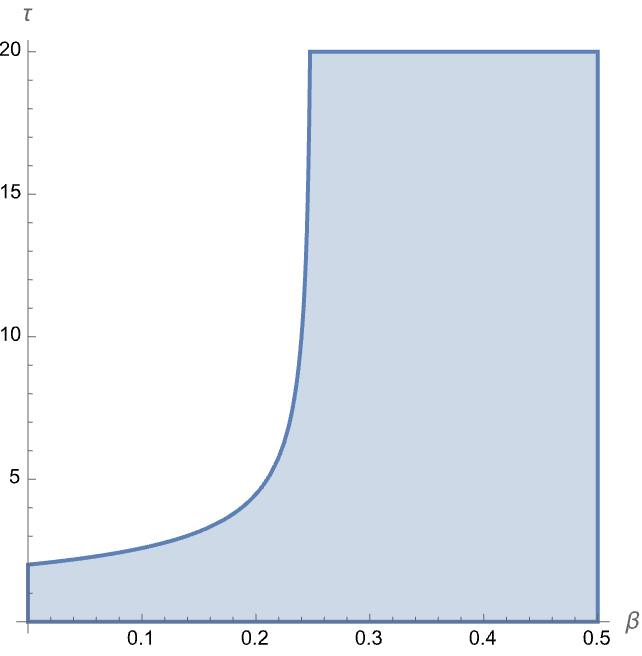
This shows the classical stability results:
Explicit Newmark (
Implicit Newmark with
Constrained Newmark-
What happens if we're using Newmark-
Displacement Control
One natural way to constrain the motion of that degree of freedom is to modify the way the acceleration is calculated to ensure that the displacement takes on the right value at the end of the step:
This, together with the velocity update step, give us two equations relating
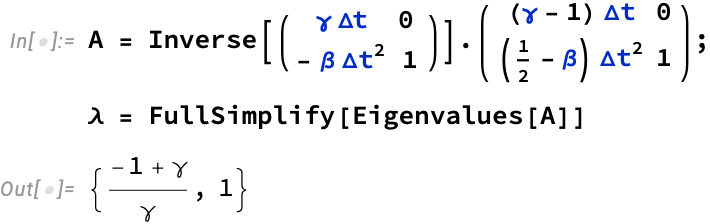
Like before, calculate the eigenvalues to figure out the stability criteria

Note: this eigenvalues of this update matrix do not depend on
, so any instabilities associated with this enforcement approach do not go away with timestep refinement!
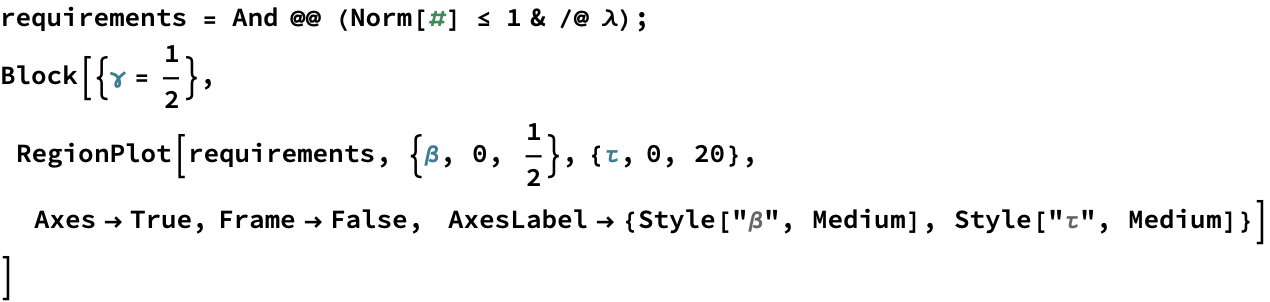
and plot the stability region

This region is equivalent to the inequality
which is a well-known sufficient condition for Newmark-
For example, consider what happens when trying to directly prescribe
While it's not surprising to see a time integrator go unstable with large timesteps, it is surprising to see that taking arbitrarily small timesteps doesn't help. This goes back to the note earlier about how the stability of the constrained dofs doesn't depend on the timestep. So, displacement control cannot be used with linear acceleration or central difference methods.
Velocity Control
Another possible interpretation of the constraint is
This time around, the eigenvalues of the update matrix are simple
and the expression for
Summary
The stability of "regular" Newmark methods is well known, and rederived here for completeness.
Prescribing constraints can impose additional stability criteria
Constraining displacements directly makes all of the
Constraining velocities imposes no additional stability criteria (in practice)
Although the velocity control approach is preferable for its stability, it also potentially suffers from displacement "drift" over time, since the numerical integration of
Mathematica notebooks are available for the stability analyses and a basic numerical example.